
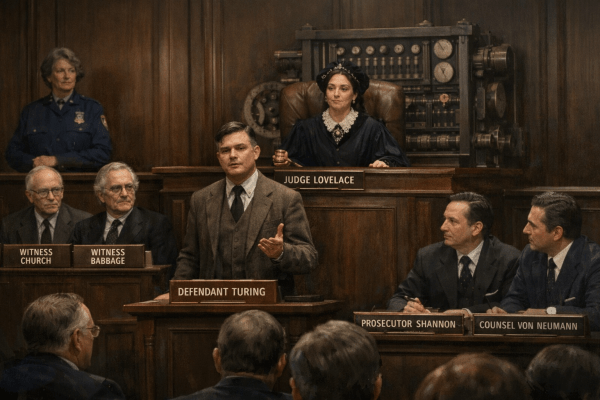
The setting is the High Court of Computation. / Judge Lovelace presides. // The charge: violation of the MUTH statute, including assault with a deadly theorem and obstruction of state legibility. // Namely, knowingly rendering computation legible to mathematics in a way that made state transformations illegible to humans.
CAST Club: State v. Alan Turing (Computation’s About State Transformations)







You must be logged in to post a comment.