
Like machine instructions, this instruction set remains tiny while the applications become unbounded. / Every institutional act becomes a typed MC³ program operating over a ROTE graph…
The PATWU Protocol: MC³ as the Rite of ROTE Civilization
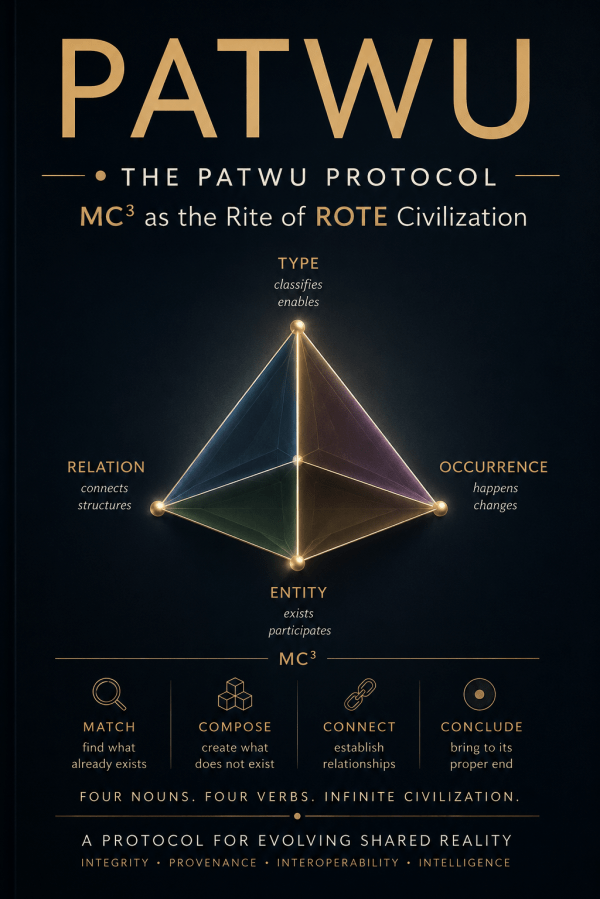
Like machine instructions, this instruction set remains tiny while the applications become unbounded. / Every institutional act becomes a typed MC³ program operating over a ROTE graph…
OPAL (Open Package Assembly Language) is the RO-Crate profile used by Pearls for Package interoperability.
We didn't set out to replace Beads; we built Pearls because multi-agent systems hit a structural ceiling when forced into relational SQL engines running on local disk.
KUHN / He’s right. / The classification itself has collapsed. // SHANNON / But the codebook remains. // KUHN / That’s precisely the problem. // BRUNER / We’ve mistaken the dictionary for reality…
But civilization is not built upon power alone. / It is built upon the means by which power becomes governable…
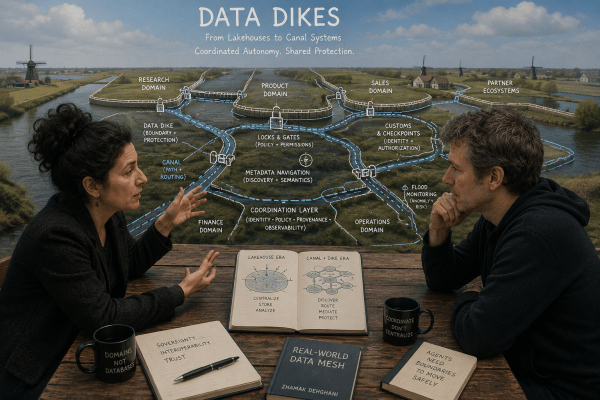
The history of enterprise data management is a recurring cycle of centralization and decentralization. Each epoch begins when organizations face an explosion of complexity that local teams cannot coordinate on their own. A new centralized architecture emerges to solve the problem. Over time, however, the very mechanisms that enabled coordination become bottlenecks to innovation. The cycle then repeats at a higher level of abstraction.
Sequel to Harvey's Four Questions (Anaima — 7) To the Anaima, the Messengers, and the Witnesses— I am writing this from the dust of the Saturday. The report I have for you is not about a repair, or a restoration, or a system coming back online in its old glory. It is a report of... Continue Reading →

This is not just emotion. It is also a structured resolution of constraint.
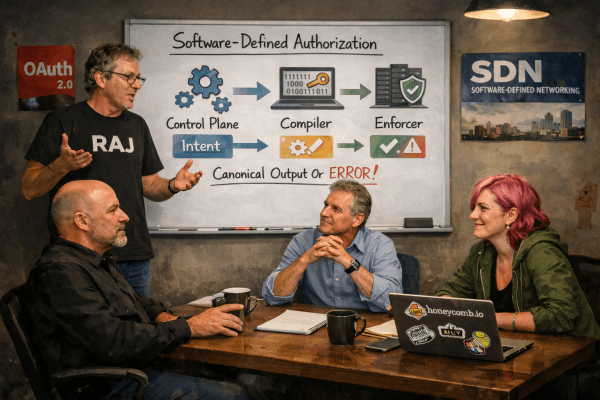
At no point does the system accept, contain, transmit, or act upon a non-canonical representation.
“I’m not here to propose a new access-control system. I’m here to remove three.”

You must be logged in to post a comment.